Hello! I am a PhD Candidate working under the supervision of Dr. Christopher Kanan in Chester F. Carlson Center for Imaging Science at Rochester Institute of Technology (RIT). My current research focuses on self-supervised learning and continual learning. I am mainly interested in efficient continual representation learning systems with minimal supervision. Previously, I interned at Siemens Healthineers, where I worked on self-supervised learning techniques for medical imaging.
I received an BS in Mechatronics Engineering from Universidad Nacional de Ingeniería where I worked on deep learning techniques for diabetic retinopathy detection and Simultaneous Localization and Mapping (SLAM) techniques for mobile robot exploration.
You can find my CV here.
Here is my Google Scholar.

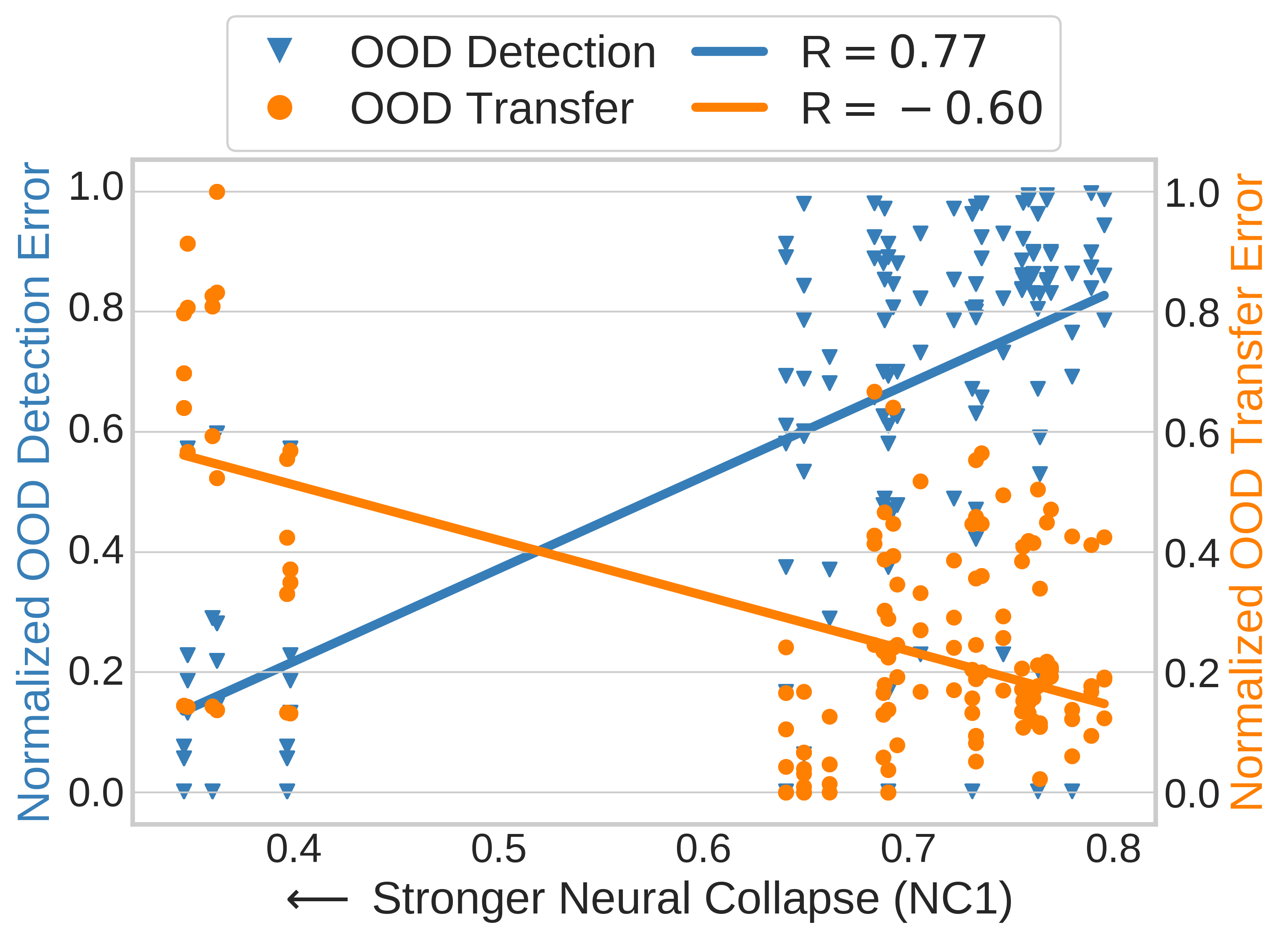
Out-of-distribution (OOD) detection and OOD generalization are widely studied in Deep Neural Networks (DNNs), yet their relationship remains poorly understood. We empirically show that the degree of Neural Collapse (NC) in a network layer is inversely related with these objectives: stronger NC improves OOD detection but degrades generalization, while weaker NC enhances generalization at the cost of detection. This trade-off suggests that a single feature space cannot simultaneously achieve both tasks. To address this, we develop a theoretical framework linking NC to OOD detection and generalization. We show that entropy regularization mitigates NC to improve generalization, while a fixed Simplex Equiangular Tight Frame (ETF) projector enforces NC for better detection. Based on these insights, we propose a method to control NC at different DNN layers. In experiments, our method excels at both tasks across OOD datasets and DNN architectures.
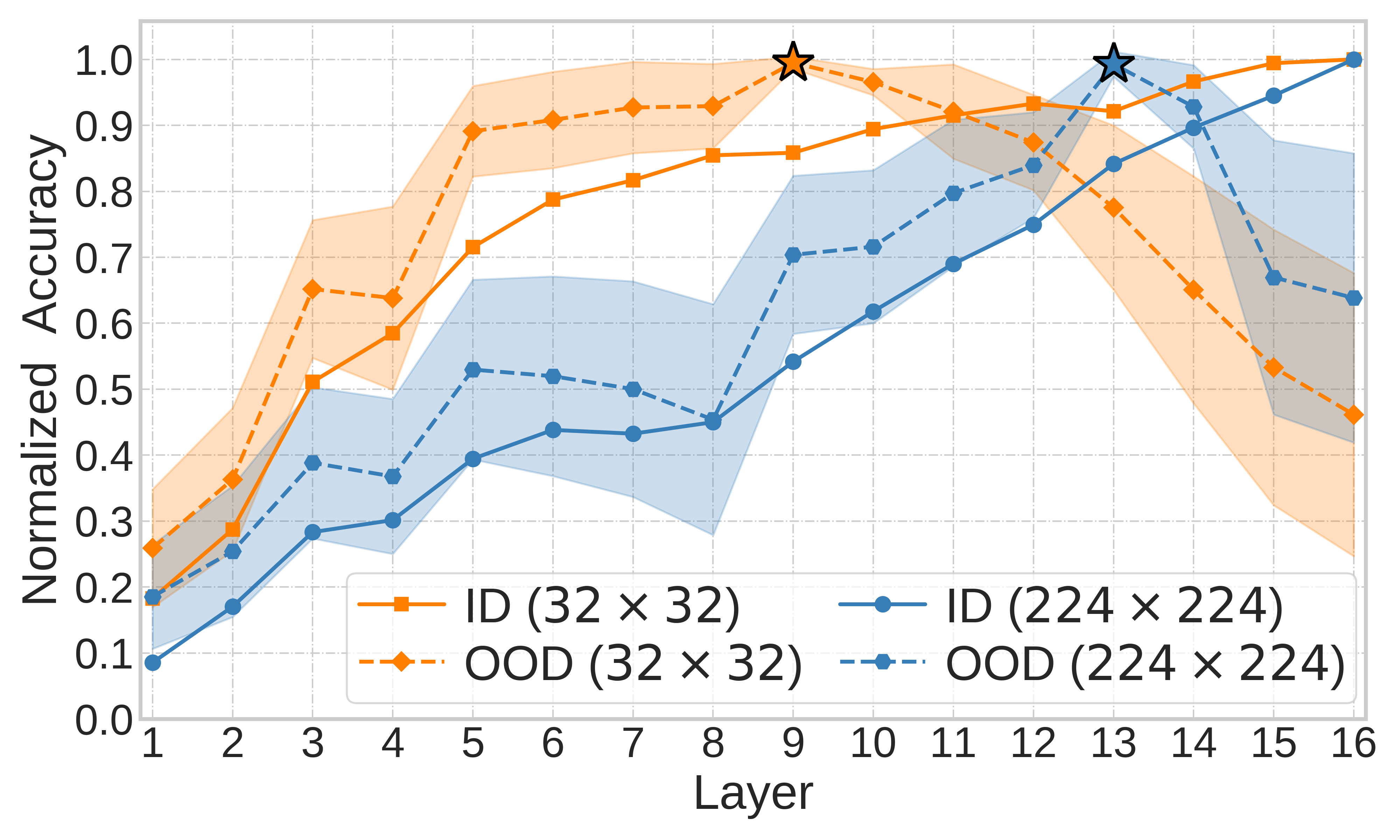
Embeddings produced by pre-trained deep neural networks (DNNs) are widely used; however, their efficacy for downstream tasks can vary widely. We study the factors influencing out-of-distribution (OOD) generalization of pre-trained DNN embeddings through the lens of the tunnel effect hypothesis, which suggests deeper DNN layers compress representations and hinder OOD performance. Contrary to earlier work, we find the tunnel effect is not universal. Based on 10,584 linear probes, we study the conditions that mitigate the tunnel effect by varying DNN architecture, training dataset, image resolution, and augmentations. We quantify each variable's impact using a novel SHAP analysis. Our results emphasize the danger of generalizing findings from toy datasets to broader contexts.
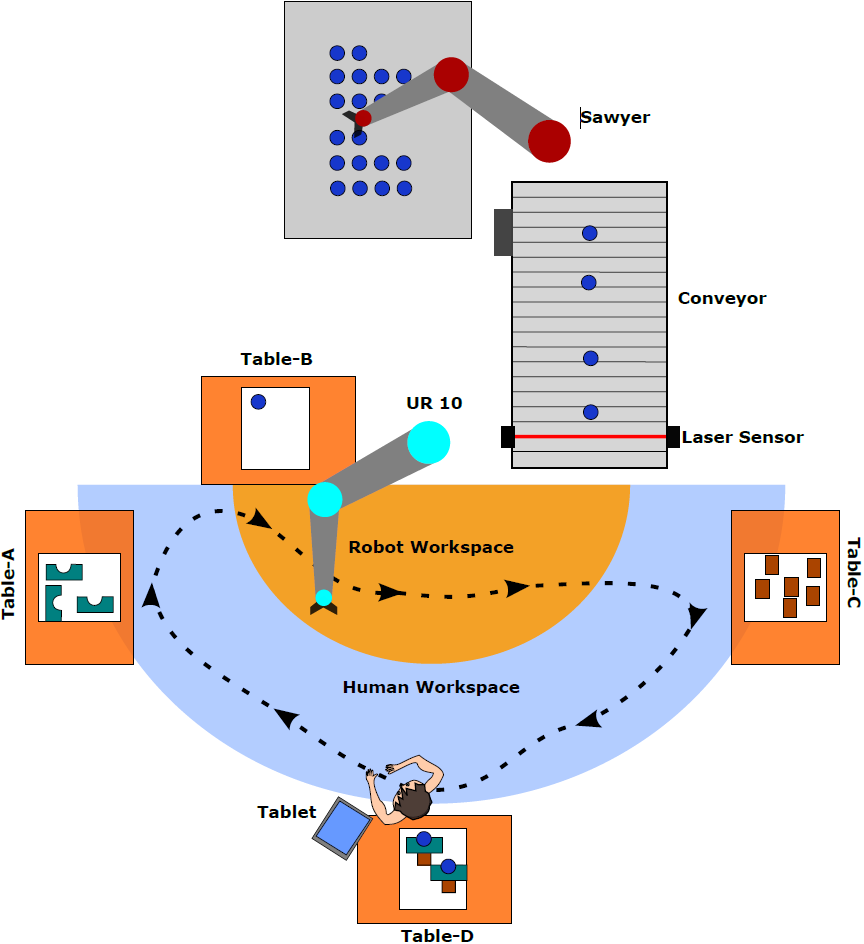
Effective collaboration between humans and robots necessitates that the robotic partner can perceive, learn from, and respond to the human's psycho-physiological conditions. This involves understanding the emotional states of the human collaborator. To explore this, we collected subjective assessments — specifically, feelings of surprise, anxiety, boredom, calmness, and comfort — as well as physiological signals during a dynamic human-robot interaction experiment. The experiment manipulated the robot's behavior to observe these responses. We gathered data from this non-stationary setting and trained an artificial neural network model to predict human emotion from physiological data. We found that using several subjects' data to train a general model and then fine-tuning it on the subject of interest performs better than training a model only using the subject of interest data.
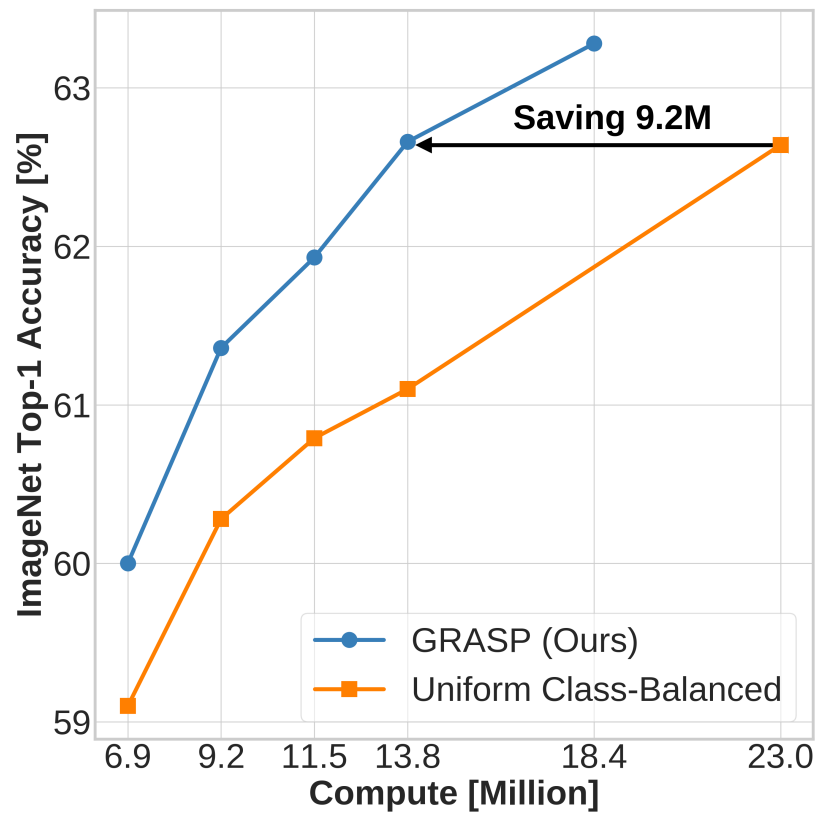
Continual learning (CL) in deep neural networks (DNNs) involves incrementally accumulating knowledge in a DNN from a growing data stream. A major challenge in CL is that non-stationary data streams cause catastrophic forgetting of previously learned abilities. Rehearsal is a popular and effective way to mitigate this problem, which is storing past observations in a buffer and mixing them with new observations during learning. This leads to a question: Which stored samples should be selected for rehearsal? Choosing samples that are best for learning, rather than simply selecting them at random, could lead to significantly faster learning. For class incremental learning, prior work has shown that a simple class balanced random selection policy outperforms more sophisticated methods. Here, we revisit this question by exploring a new sample selection policy called GRASP. GRASP selects the most prototypical (class representative) samples first and then gradually selects less prototypical (harder) examples to update the DNN. GRASP has little additional compute or memory overhead compared to uniform selection, enabling it to scale to large datasets. We evaluate GRASP and other policies by conducting CL experiments on the large-scale ImageNet-1K and Places-LT image classification datasets. GRASP outperforms all other rehearsal policies. Beyond vision, we also demonstrate that GRASP is effective for CL on five text classification datasets.
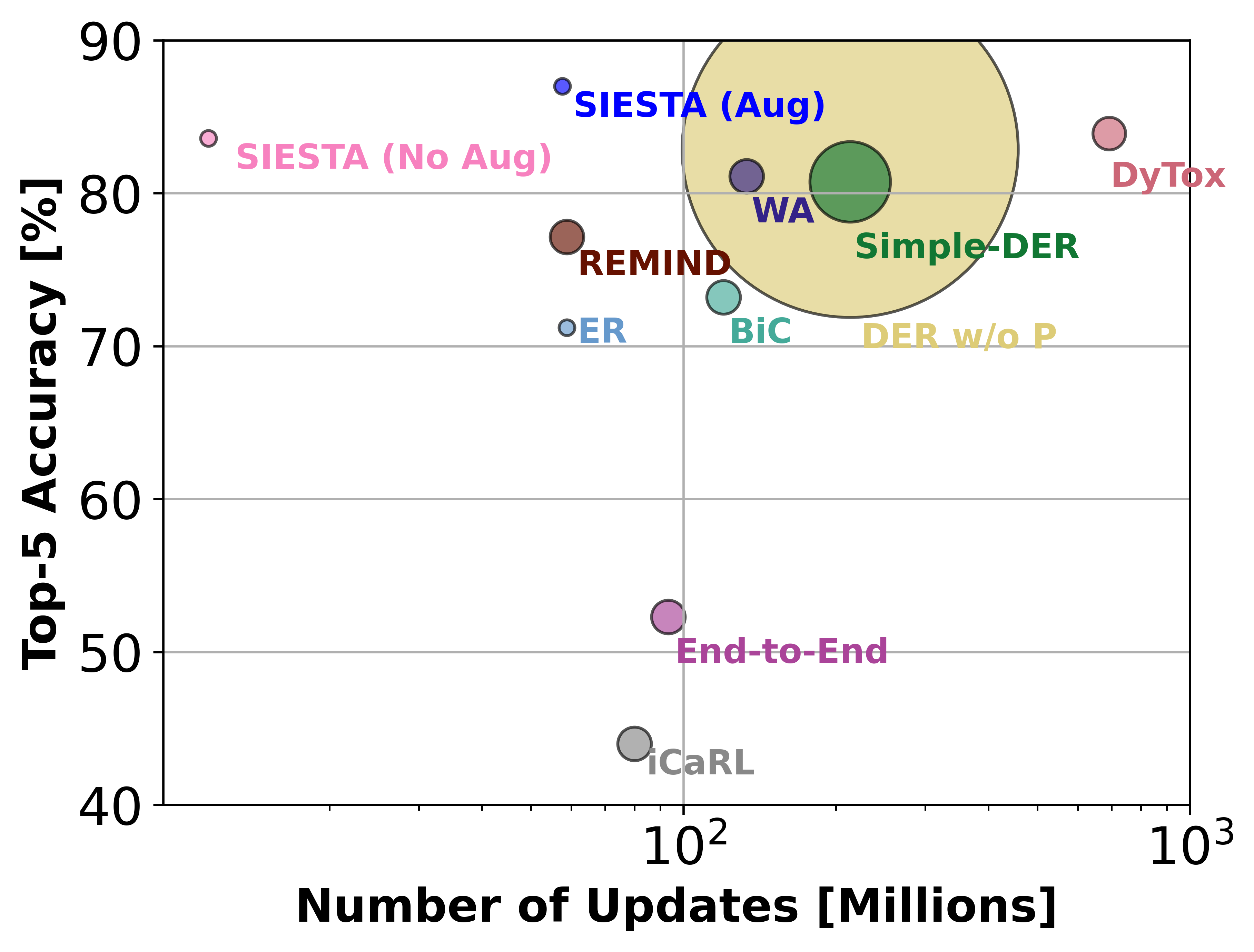
In supervised continual learning, a deep neural network (DNN) is updated with an ever-growing data stream. Unlike the offline setting where data is shuffled, we cannot make any distributional assumptions about the data stream. Ideally, only one pass through the dataset is needed for computational efficiency. However, existing methods are inadequate and make many assumptions that cannot be made for real-world applications, while simultaneously failing to improve computational efficiency. In this paper, we propose a novel online continual learning method, SIESTA based on wake/sleep framework for training, which is well aligned to the needs of on-device learning. The major goal of SIESTA is to advance compute efficient continual learning so that DNNs can be updated efficiently using far less time and energy. The principal innovations of SIESTA are: 1) rapid online updates using a rehearsal-free, backpropagation-free, and data-driven network update rule during its wake phase, and 2) expedited memory consolidation using a compute-restricted rehearsal policy during its sleep phase. For memory efficiency, SIESTA adapts latent rehearsal using memory indexing from REMIND. Compared to REMIND and prior arts, SIESTA is far more computationally efficient, enabling continual learning on ImageNet-1K in under 2.4 hours on a single GPU; moreover, in the augmentation-free setting it matches the performance of the offline learner, a milestone critical to driving adoption of continual learning in real-world applications.

Supervised Continual learning involves updating a deep neural network (DNN) from an ever-growing stream of labeled data. While most work has focused on overcoming catastrophic forgetting, one of the major motivations behind continual learning is being able to efficiently update a network with new information, rather than retraining from scratch on the training dataset as it grows over time. Despite recent continual learning methods largely solving the catastrophic forgetting problem, there has been little attention paid to the efficiency of these algorithms. Here, we study recent methods for incremental class learning and illustrate that many are highly inefficient in terms of compute, memory, and storage. Some methods even require more compute than training from scratch! We argue that for continual learning to have real-world applicability, the research community cannot ignore the resources used by these algorithms. There is more to continual learning than mitigating catastrophic forgetting.
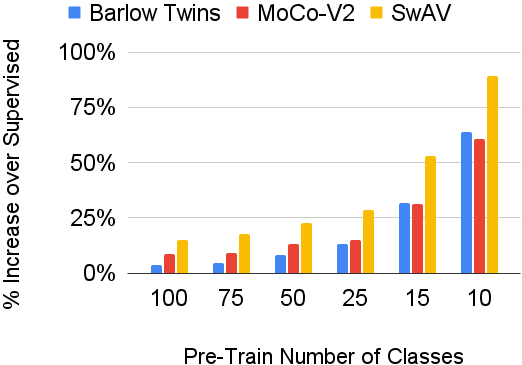
In continual learning, a system must incrementally learn from a non-stationary data stream without catastrophic forgetting. Recently, multiple methods have been devised for incrementally learning classes on large-scale image classification tasks, such as ImageNet. State-of-the-art continual learning methods use an initial supervised pre-training phase, in which the first 10% - 50% of the classes in a dataset are used to learn representations in an offline manner before continual learning of new classes begins. We hypothesize that self-supervised pre-training could yield features that generalize better than supervised learning, especially when the number of samples used for pre-training is small. We test this hypothesis using the self-supervised MoCo-V2 and SwAV algorithms. On ImageNet, we find that both outperform supervised pre-training considerably for online continual learning, and the gains are larger when fewer samples are available. Our findings are consistent across three continual learning algorithms. Our best system achieves a 14.95% relative increase in top-1 accuracy on class incremental ImageNet over the prior state of the art for online continual learning.